
In the previous post about luge, I mentioned that there was one thing that came up when Rhett and I were talking about this, namely why there are differences in times between racers. The toy physics model I set up last time suggests that the difference between riders is only a matter of aerodynamics-- two riders with the same mass and cross-sectional area ought to achieve the same speed. So why do they all get different times?
Well, if the sleds and other gear were all identical and locked into tracks, then mass and aerodynamics would be the entire story. But they're not-- the rules allow for some differences in sleds, and those tight bodysuits are presumably made by different equipment companies of slightly different materials that might make a difference in the drag. More importantly, though, the sleds aren't on tracks, and they do allow some minimal degree of steering. That steering allows for some individual variation, and probably accounts for most of the difference.
Rhett mentioned in passing that this is probably a "max-min" sort of problem, which is the kind of shorthand comment that makes sense to a physicist, but needs some unpacking for non-physicists. So let's take a look at a very rudimentary mathematical model of this whole thing.
Here's the figure from the previous post used to set up the calculation of the forces and speed involved:
 A view of a object on a banked curve, showing the forces that act.
A view of a object on a banked curve, showing the forces that act.
For that, we assumed that the track is shaped like a circle with a radius r and bent into a long curve with radius R. Given that, there's a maximum speed for a sled to stay on a curve that depends on the angle θ with the vertical, given by:
$latex v_{max}^2 = R g\frac{\sin \theta + \mu \cos \theta}{\cos \theta - \mu \sin \theta} $
This depends on the angle and the coefficient of friction, and gets bigger as both of those increase. So, the higher up the wall the sled goes, the faster it can go without slipping outward.
But if you're thinking about going around the big corner, that's not the only effect in play. As the angle increases, there's also an increase in the radius of the circle the sled is going around. A little bit of geometry can convince you that the distance traveled is:
$latex D = 2 \pi (R + r \sin \theta ) $
(The 2 assumes a complete circle of that curvature; you can scale down by whatever factor you need to account for a less than complete loop.)
So, both the maximum possible speed and the distance traveled increase as you go to larger angles. Now, what matters for a racing sport like luge is the time required to complete the course, which is the ratio of these-- the time is the distance divided by the speed. Which means that there is a trade-off between these two things that might conceivably give you an optimum value: a particular angle where the increased speed has shortened the time, by more than the increased distance has lengthened it.
If you take the formulas above, and divide distance by speed, and do a bit of algebra, you can get a formula for the time to complete a loop at a particular angle up the wall, assuming the sled is running at the maximum possible speed for the angle in question. That gives you:
$latex t_{min} = 2 \pi \sqrt{\frac{R + r \sin \theta }{g}} \sqrt{\frac{\cos \theta - \mu \sin \theta }{\sin \theta + \mu \cos \theta }} $
(Where I added the change in distance with increased angle to the speed formula, as well.)
This isn't all that clear, maybe, but a little thought shows that it does more or less what it ought to: the time increases if you increase the radius (which affects the distance more than the speed) and decreases if you increase the coefficient of friction (which allows greater speed for the same radius). Other than that... Well, it's an equation.
Now, figuring out the optimum value of this is a first-year calculus sort of problem: you take the derivative with respect to the angle, and set it equal to zero, then solve for the value(s) of the angle corresponding to maximum or minimum times. But, you know, doing that would require me to remember all those trig function derivatives, and do a bunch of chain rule stuff, and you know what? Life is just too short.
However, I have a licensed copy of SigmaPlot, and I can just simulate the values for a bunch of different conditions, and see what happens. And when I do that, I get this graph of speed as a function of angle, where I looked at a couple of online sources (here and here) to estimate the relevant radii as 20m for the big curve, and 2m for the circular track.
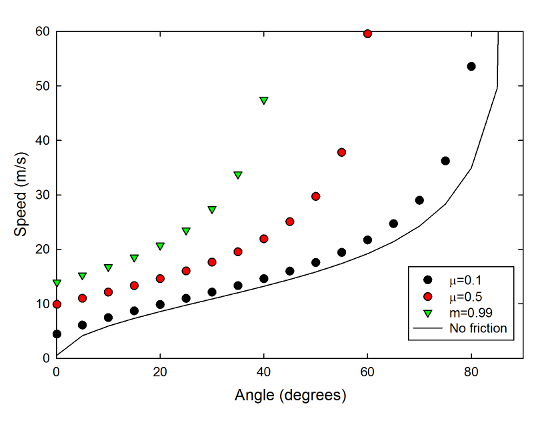 The speed of a sled going around a 20m curve for different coefficients of friction.
The speed of a sled going around a 20m curve for different coefficients of friction.
I've calculated the maximum speed for three different values of the coefficient of friction, from 0.1 up to nearly 1, to give a sense of the range. You could perfectly well have the coefficient get bigger than 1, given that the blades of the sled are presumably biting into the ice somewhat, but I didn't bother.
You can see that the values go off the graph at lower angles as the coefficient increased. That's because of the denominator in that speed equation up above-- the sine increases as the cosine decreases, and for any choice of μ there's an angle where the two terms are exactly equal, and the denominator becomes zero, which means the maximum possible speed is infinite.
(Of course, this is not the maximum practical speed, which would be set by the fact that there's an acceleration of the sled and rider as you go around the curve, and that goes up as the square of the speed. So, at some point, the acceleration would cause the rider to black out... And, of course, there's the issue of air resistance, which limits the maximum speed that can be achieved even in a straight line-- the world record is around 43 m/s, which is getting pretty close to the point where a rider would black out on a 20m curve.)
(As a very rough sanity check, pictures of luge races, like the "featured image" up top generally show riders around halfway up the wall, probably a bit less, which corresponds to an angle of around 45 degrees in this model. That's not much of a check, but does at least suggest that we're not way off base, here.)
It's important to note that there's also a minimum speed possible, when the frictional force is exactly zero. That's represented by the solid line in the graph. So the real speed of a sled and rider for each coefficient will be somewhere in the range between the point for a given angle and that line. Which is a pretty big range, particularly as friction gets large.
That's the speed limit, so what about the time? Well, if I calculate the distance around a 20m curve for the relevant angles, and divide by the speeds from this graph, I get the following:
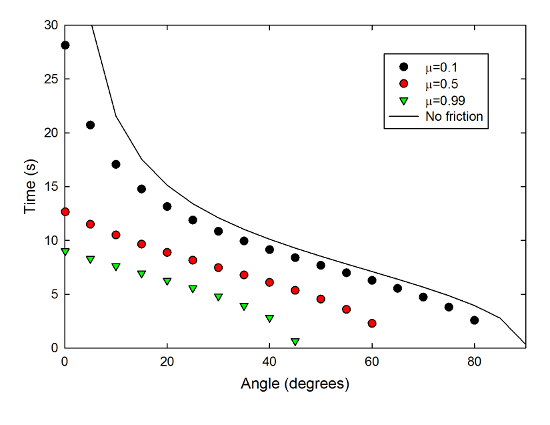 The time for a sled to go around a 20m radius curve for different coefficients of friction.
The time for a sled to go around a 20m radius curve for different coefficients of friction.
This has a kind of funny shape, but a clear trend: provided the sled is running right at the maximum possible speed for a given angle, it's always better to go to a larger angle. The difference is most pronounced for the low friction cases-- for the zero-friction limit, there's no way to turn at all, so the time is infinite. There isn't a minimum value of the time for any angle, so there's no clear optimum from this.
If you think about it, this makes sense: the extra distance is pretty small (maxing out at 1/10th of the circumference of the curve), while the speed increases very rapidly. The speed increase always wins. If you put in very unrealistic values-- a very small radius for the curve, and a huge radius for the cross-section of the track, you can generate a curve with a maximum time-- where the distance increase wins out for a little while-- but in the end, the faster maximum speed will always make climbing the wall more advantageous.
That's a little disappointing from a math-and-physics problem sense, but it probably makes the sport a tiny bit more forgiving for the riders.
Now, there are a bunch of caveats about this, chiefly the fact that the values above are the maximum possible speed, which is not necessarily the speed of an actual rider (which is determined by slope and aerodynamics). So you're not going to be able to predict times very accurately from this kind of model. The way the forces work, it's always possible to go at a lower-than-maximum speed at a large angle (provided you don't go too slowly). And, of course, a real course has more than a single turn in one direction.
Getting the best time is going to be a matter of steering the sled to best match angle to speed. Given the same slope and similar aerodynamics, most racers will have very similar speeds, but the fastest time will be whoever can most closely match their speed to the angle for which they're going at the maximum possible speed. And keep doing that as they turn in different directions, by making tiny adjustments while rocketing down the course at 90 mph.
Which is, ultimately, what sets champion lugers apart from random dudes with sleds. And, for that matter, separates actual lugers from physicists who might be able to calculate the angles given time and a laptop, but who would almost certainly crash messily if put on an actual sled.
Guess there's some sign error in your formulae:
with µ=0.99, you'd need a slope of ~45° to keep it going, and increasing µ means less force needed to keep the sled at a certain angle Θ.
I suspect there is a lot more going on. Partly it is about conserving energy -minimizing friction. Presumably frictional loses increase with increasing tangential forces on the runners. Also you have a bit of the Brachistichrone(spelling??) problem, which is often used to introduce variational calculus. This problem assumes an ice skater with no friction on a hill, whose task is to reach some point some distance away both horizontally and vertically, find the path that minimizes his time. If he goes too low, the distance to travel increases, if he goes too high, is speed is lower. Calculus of variations allows one to transform the task of miniming a path dependent integral to an ordinary differential equation. But, to get back to your sled problem, if the rider goes lower into the curve, his instantaneous velocity is going to be higher (he has more kinetic but less potential energy), but presumably his frictional loses are higher, which impacts what happens later on in the course.
I suspect there is a lot more going on.
Oh, absolutely. This model is even more of a toy model than most of the stuff I do. There are lots of simplifications involved in this, and I'm barely scratching the surface.
One important other thing that is going on is the need to exit the turn cleanly. If you are too high up you are going to rub up against the sides of the track when you exit the turn, (or worse, skid).